BEC hay U-BEC là gì?
- BEC: Battery Eliminator Circuit
- U-BEC: Ultimate BEC thực chất là một BEC rời, gắn thêm bên ngoài.
Cả BEC lẫn U-BEC đều làm chung một chức năng nhiệm vụ là cung cấp nguồn có điện áp ổn định 4.8V, 5V hoặc 6V cho Rx, servo, gyro v.v... hoạt động từ nguồn Pin (7.2, 11.1 hoặc hơn) chung
Các thông số cần quan tâm khi sử dụng BEC hay U-BEC
- Imax: là giá trị dòng điện cao nhất mà BEC có thể chịu được.
- Uout: là điện áp mà BEC cung cấp.. thường là 4.8V, 5V, 6V v.v...
- Uin: là khoảng điện áp mà BEC có khã năng làm việc. Thường khoảng điện áp này lớn hơn Uout.
- Loại BEC: linear (BEC thường), Switch (U-Bec hay Super Bec).
BEC, U-BEC thường gặp ở đâu?
- BEC hay linear BEC thường được tích hợp trong ESC công suất bé, và thường dùng các loại linh kiện như 7805, 1117-05 hay một số loại khác tương đương. Công suất thông thường từ 1A-3A, cũng có thể có công suất lớn hơn nhưng mạch sẽ phức tạp hơn nhiều. Khi hoạt động tỏa nhiều nhiệt.
Một số mạch BEC minh họa, mạch này cho điện áp ra là 6V, 1A-2A

U-BEC có thể là loại linear BEC hay switching BEC. Nhưng do linear BEC có một số hạn chế nên U-BEC thường là switching BEC (là một loại Switching DC-DC converter), thường được làm thành một module riêng hay được tích hợp trong một số ESC với công suất lớn (lúc này hay gọi là super BEC). Thông thường.. trên U-BEC có một cuộn dây be bé, hình vuông hoặc hình tròn. Hiệu suất làm việc khá cao, với công suất lớn thì có nhiều ưu điểm rỏ rệt so với linear BEC như kích thước nhỏ gọn, ít tỏa nhiệt.

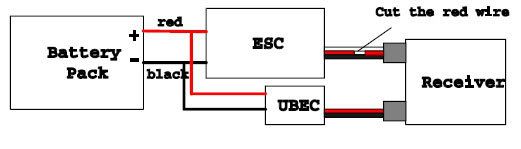
Sơ đồ nối dây khi sử dụng U-BEC
Tại sao phải dùng U-BEC?
Kha kha, đây là một câu hỏi gây nhiều tranh cải, vì U-BEC giá không đắt nhưng cũng chẵng hề rẻ tí nào, thông thường 7$ - 50$ tùy theo loại và công suất.
Vấn đề đáng quan tâm khi sử dụng U-BEC là: công suất, độ ổn định, hiệu suất.
- Công suất thì U-BEC có thể lớn gấp nhiều lần BEC
- Độ ổn định thì cao hơn BEC là chắc rồi. Nhưng tuyệt nhiên không được cho em nó tắm nhé.. em nó mà tắm cái thì... tèo.
- Hiệu suất cao hơn nhiều lần so với BEC.
Ta sẽ đi sâu vào.. tìm hiểu tại sao hiệu suất của U-BEC lại cao hơn BEC.
Chúng ta thử làm một vài phép tính như thế này: Với 1 E heli như Trex450, có 4 servo + 1 gyro + 1 Rx là các thiết bị tiêu thụ điện từ BEC!
- 1 micro servo có dòng tiêu thụ trung bình 200mA
- 1 gyro có dòng tiêu thụ trung bình 20-50mA
- 1 Rx có dòng tiêu thụ trung bình 15-30mA
- 1 power batt 3 cells lipo U= 11.1V
- BEC out V= 5V
-> Mà heli khác cánh bằng ở chổ là gần như các servo liên tục hoạt động và chịu tải do đó bình quân tối thiểu BEC phải cung cấp một dòng điên Itb khoảng 1A!
-> Công suất sử dụng
' P0 = V*Itb = 5V*1A = 5W
-> Tổng công suất mà Pin phải cung cấp
' P = U*Itb ~ 11V*1A = 11W
-> Hiệu suất sử dụng là
' % = 100* P0/P = 5/11 = 46%
-> Công suất thất thoát dưới dạng nhiệt là
' Pttn = P-P0 = 11-5 = 6W
-> Một viên Pin như trên (450) thường là 11.1V - 2300mAh có công suất là:
' Ppin = U*Q = 11.1*2.3 = 25.53W
-> Vấn đề còn lại thất thoát nhiệt của ESC, trung bình các ESC 25-35A có nội trở khoảng 0.01-0.003 một số loại có nội trở còn nhỏ hơn! Vậy nên công suất thất thoát trên ESC là
' Pesc = Iesc*Resc ~ 0.35W
Đem so sánh 2 giá trị trên ta thấy Pttn>Pesc 17 lần (tức công suất tiêu tán nhiệt do BEC gây ra lớn hơn 17 lần :rolleyes: công suất tiêu tán nhiệt do ESC gây ra!
Còn công suất thất thoát nhiệt của BEC so với công suất mà Pin có thể cung cấp
% = 100* Pttn/Ppin = 6/25.53 ~ 23.5%
Một con số cũng đáng kể đó chứ? Nếu dùng BEC thì gần 1/4 dung lượng Pin là dùng để đốt nóng cái BEC, gần 1/5 dung lượng Pin là dùng để nuôi Rx, servo..., chỉ còn hơn 1/2 là dùng để bay thôi.
Đó là chưa nói tới việc.. nóng quá cũng dể die lắm lắm.
Để cải thiện vấn đề trên mình dùng UBEC đổi điện áp từ 11.1 xuống 5V hay 6V bằng cơ chế Switching DC-DC convertor nên hiệu suất cực kì cao! Trung bình UBEC đạt được hiệu suất sử dụng từ 90-95% hoặc hơn. Tức là lúc này công suất tiêu tán nhiệt do BEC sinh ra là 5V*1A*0.1=0.5W tức nhỏ hơn 12 lần so với BEC thường.
Đây là một số đặc tính của UBEC mà mình đã thử
- Input 5,5-23V (2-5s lipo)
- Outpu 5V/3A
- Nặng 6g
- Tần số 300KHz (switching frequency)
- Hiệu suất 90%
Lý do dùng UBEC là:
1. Hiệu suất sử dụng cao, tiết kiệm Pin
2. Công suất lớn
3. Từ 1 và 2 => UBEC làm việc ổn định và đảm bảo hơn linear BEC.
- BEC: Battery Eliminator Circuit
- U-BEC: Ultimate BEC thực chất là một BEC rời, gắn thêm bên ngoài.
Cả BEC lẫn U-BEC đều làm chung một chức năng nhiệm vụ là cung cấp nguồn có điện áp ổn định 4.8V, 5V hoặc 6V cho Rx, servo, gyro v.v... hoạt động từ nguồn Pin (7.2, 11.1 hoặc hơn) chung
Các thông số cần quan tâm khi sử dụng BEC hay U-BEC
- Imax: là giá trị dòng điện cao nhất mà BEC có thể chịu được.
- Uout: là điện áp mà BEC cung cấp.. thường là 4.8V, 5V, 6V v.v...
- Uin: là khoảng điện áp mà BEC có khã năng làm việc. Thường khoảng điện áp này lớn hơn Uout.
- Loại BEC: linear (BEC thường), Switch (U-Bec hay Super Bec).
BEC, U-BEC thường gặp ở đâu?
- BEC hay linear BEC thường được tích hợp trong ESC công suất bé, và thường dùng các loại linh kiện như 7805, 1117-05 hay một số loại khác tương đương. Công suất thông thường từ 1A-3A, cũng có thể có công suất lớn hơn nhưng mạch sẽ phức tạp hơn nhiều. Khi hoạt động tỏa nhiều nhiệt.
Một số mạch BEC minh họa, mạch này cho điện áp ra là 6V, 1A-2A
U-BEC có thể là loại linear BEC hay switching BEC. Nhưng do linear BEC có một số hạn chế nên U-BEC thường là switching BEC (là một loại Switching DC-DC converter), thường được làm thành một module riêng hay được tích hợp trong một số ESC với công suất lớn (lúc này hay gọi là super BEC). Thông thường.. trên U-BEC có một cuộn dây be bé, hình vuông hoặc hình tròn. Hiệu suất làm việc khá cao, với công suất lớn thì có nhiều ưu điểm rỏ rệt so với linear BEC như kích thước nhỏ gọn, ít tỏa nhiệt.
Sơ đồ nối dây khi sử dụng U-BEC
Tại sao phải dùng U-BEC?
Kha kha, đây là một câu hỏi gây nhiều tranh cải, vì U-BEC giá không đắt nhưng cũng chẵng hề rẻ tí nào, thông thường 7$ - 50$ tùy theo loại và công suất.
Vấn đề đáng quan tâm khi sử dụng U-BEC là: công suất, độ ổn định, hiệu suất.
- Công suất thì U-BEC có thể lớn gấp nhiều lần BEC
- Độ ổn định thì cao hơn BEC là chắc rồi. Nhưng tuyệt nhiên không được cho em nó tắm nhé.. em nó mà tắm cái thì... tèo.
- Hiệu suất cao hơn nhiều lần so với BEC.
Ta sẽ đi sâu vào.. tìm hiểu tại sao hiệu suất của U-BEC lại cao hơn BEC.
Chúng ta thử làm một vài phép tính như thế này: Với 1 E heli như Trex450, có 4 servo + 1 gyro + 1 Rx là các thiết bị tiêu thụ điện từ BEC!
- 1 micro servo có dòng tiêu thụ trung bình 200mA
- 1 gyro có dòng tiêu thụ trung bình 20-50mA
- 1 Rx có dòng tiêu thụ trung bình 15-30mA
- 1 power batt 3 cells lipo U= 11.1V
- BEC out V= 5V
-> Mà heli khác cánh bằng ở chổ là gần như các servo liên tục hoạt động và chịu tải do đó bình quân tối thiểu BEC phải cung cấp một dòng điên Itb khoảng 1A!
-> Công suất sử dụng
' P0 = V*Itb = 5V*1A = 5W
-> Tổng công suất mà Pin phải cung cấp
' P = U*Itb ~ 11V*1A = 11W
-> Hiệu suất sử dụng là
' % = 100* P0/P = 5/11 = 46%
-> Công suất thất thoát dưới dạng nhiệt là
' Pttn = P-P0 = 11-5 = 6W
-> Một viên Pin như trên (450) thường là 11.1V - 2300mAh có công suất là:
' Ppin = U*Q = 11.1*2.3 = 25.53W
-> Vấn đề còn lại thất thoát nhiệt của ESC, trung bình các ESC 25-35A có nội trở khoảng 0.01-0.003 một số loại có nội trở còn nhỏ hơn! Vậy nên công suất thất thoát trên ESC là
' Pesc = Iesc*Resc ~ 0.35W
Đem so sánh 2 giá trị trên ta thấy Pttn>Pesc 17 lần (tức công suất tiêu tán nhiệt do BEC gây ra lớn hơn 17 lần :rolleyes: công suất tiêu tán nhiệt do ESC gây ra!
Còn công suất thất thoát nhiệt của BEC so với công suất mà Pin có thể cung cấp
% = 100* Pttn/Ppin = 6/25.53 ~ 23.5%
Một con số cũng đáng kể đó chứ? Nếu dùng BEC thì gần 1/4 dung lượng Pin là dùng để đốt nóng cái BEC, gần 1/5 dung lượng Pin là dùng để nuôi Rx, servo..., chỉ còn hơn 1/2 là dùng để bay thôi.
Đó là chưa nói tới việc.. nóng quá cũng dể die lắm lắm.
Để cải thiện vấn đề trên mình dùng UBEC đổi điện áp từ 11.1 xuống 5V hay 6V bằng cơ chế Switching DC-DC convertor nên hiệu suất cực kì cao! Trung bình UBEC đạt được hiệu suất sử dụng từ 90-95% hoặc hơn. Tức là lúc này công suất tiêu tán nhiệt do BEC sinh ra là 5V*1A*0.1=0.5W tức nhỏ hơn 12 lần so với BEC thường.
Đây là một số đặc tính của UBEC mà mình đã thử
- Input 5,5-23V (2-5s lipo)
- Outpu 5V/3A
- Nặng 6g
- Tần số 300KHz (switching frequency)
- Hiệu suất 90%
Lý do dùng UBEC là:
1. Hiệu suất sử dụng cao, tiết kiệm Pin
2. Công suất lớn
3. Từ 1 và 2 => UBEC làm việc ổn định và đảm bảo hơn linear BEC.